Lineare Abbildungen
Allgemein
Definition
Für eine Lineare Abbildung \(\alpha\) mit den Vektoren \(\vec{p}\) und \(\vec{q}\) gelten (Die eigentliche Definition):
Aus diesen Bedingungen folgt eine dritte Bedingung:
Sie wird wie folgt bewiesen:
- \(\textrm{I. + II.}\implies\textrm{III.}\;\textrm{mit}\;\vec{v}=a\cdot\vec{p}; \;\vec{u}=b\cdot\vec{q}\)
- \(\textrm{III.}\implies\textrm{I.}\;\textrm{mit}\;b=0; \;a\in\mathbb{R}\)
- \(\textrm{III.}\implies\textrm{II.}\;\textrm{mit}\;a=b=1\)
Lineare Abbildungen \(\alpha\) haben also die folgende Form:
Beweise:
- \(\alpha\) erfüllt \(\textrm{I.}\) mit \(\vec{p}=\begin{pmatrix} p_x\\p_y\end{pmatrix}; \;\vec{q}=\begin{pmatrix} q_x\\q_y\end{pmatrix}\):
- \(\alpha\) erfüllt \(\textrm{II.}\) mit \(\vec{p}=\begin{pmatrix} p_x\\p_y\end{pmatrix}; \;\vec{q}=\begin{pmatrix} q_x\\q_y\end{pmatrix}\):
Basisvektoren
Die Basisvektoren \(\vec{e_1}=\begin{pmatrix}1\\0\end{pmatrix}\) und \(\vec{e_2}=\begin{pmatrix}0\\1\end{pmatrix}\) haben die Abbildungen (So kann man \(a\), \(b\), \(c\) und \(d\) einfach bestimmen, weil man schaut, wo die Basisvektoren landen sollten):
Fixpunkte
Für Fixpunkte gilt:
Determinante
Für die Determinante \(\Delta\) gilt:
Die Determinante entsteht auch beim Kreuzprodukt der abgebildeten Basisvektoren. Sie hat also folgende geometrische Bedeutungen für die Abbildung:
- Die Bildfigur hat eine um \(\Delta\) grössere Fläche (Beweise mit Vergleich der Dreiecksfläche der tatsächlichen Basisvektoren mit derjenigen der abgebildeten Basisvektoren)
- Die Bildfigur ändert den Drehsinn, wenn \(\Delta<0\)
Umkehrabbildung
Um die Umkehrabbildung \(\alpha^{-1}\) zu bestimmen, vertauscht man \(x\) und \(y\) mit \(x'\) und \(y'\) und löst dann nach \(x'\) und \(y'\) auf. Oder allgemein:
Umkehrabbildungen existieren also nur dann, wenn \(\Delta\not=0\) gilt.
Verkettungen
Für Verkettungen \(\alpha\circ\beta\):
Spezielle Abbildungen
Drehung um den Origo
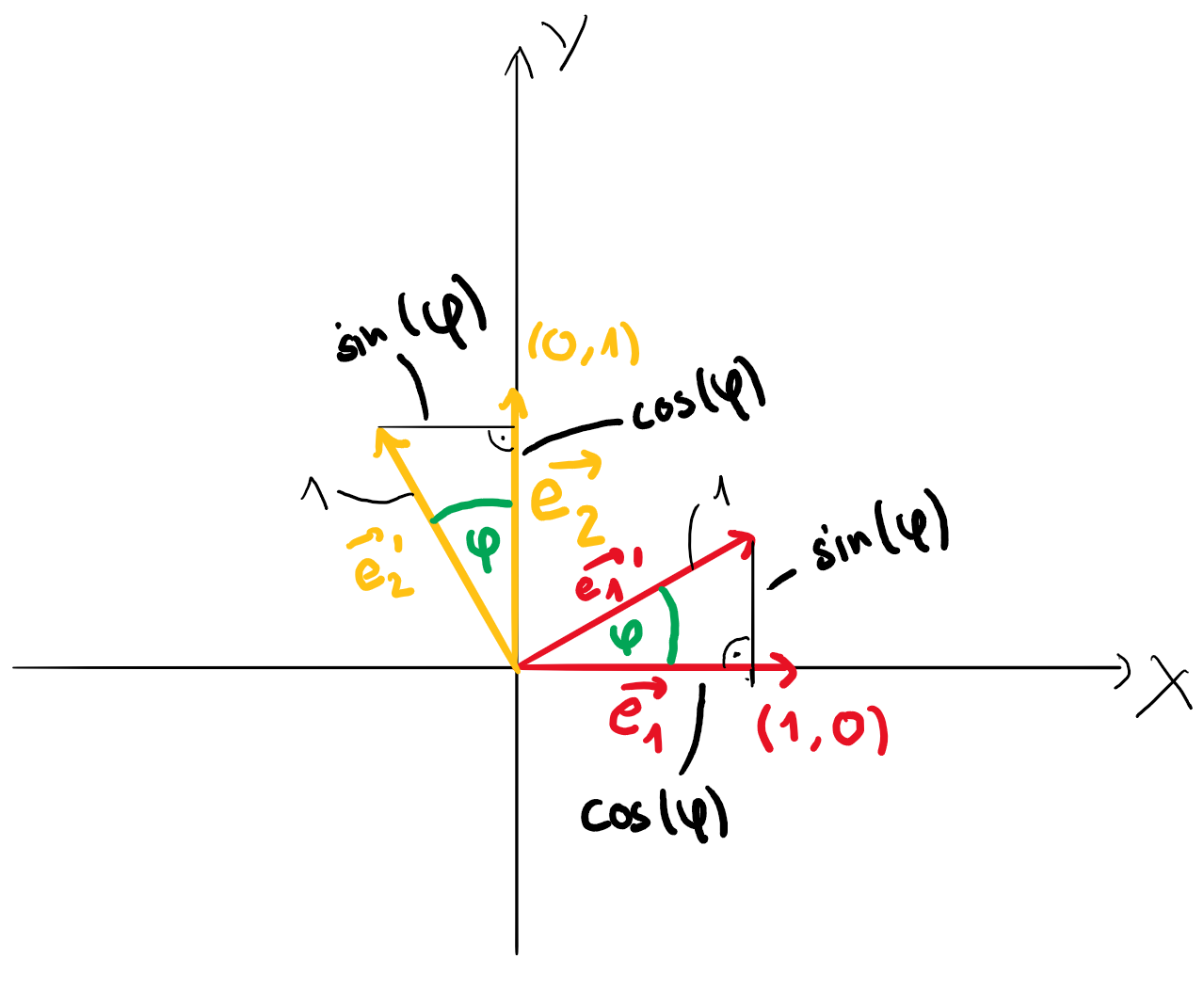
Für die Drehung mit Winkel \(\varphi\) um den Origo gilt:
Spiegelung an einer Gerade
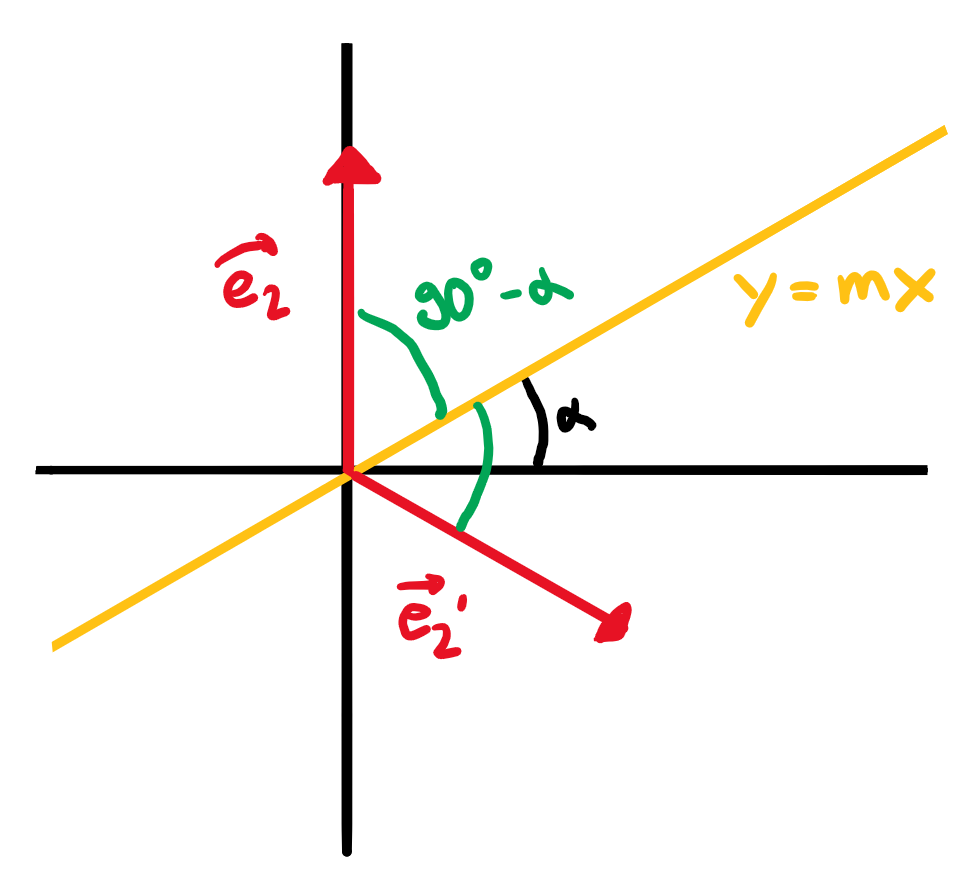
Für die Spiegelung an einer Gerade mit dem Neigungswinkel \(\alpha\) gilt:
Gleichung von gedrehten Funktionen und Relationen
Wenn wir die Funktion \(f(x)\) (z. B. \(y=\frac{1}{2}x^2\)) um den Winkel \(\varphi\) drehen wollen (also die Relation \(r(x)\) gefunden werden soll), dann geht man wie folgt vor:
Man geht rückwärts von der Relation \(r(x)\) auf die Funktion \(f(x)\), weil die Funktionsgleichung schon gegeben ist:
Jetzt ersetzt man \(x\) und \(y\) aus der Funktion (z. B. \(y=\frac{1}{2}x^2\)) mit den erhaltenen \(x'\) und \(y'\), z. B.: